Assignment 1
Software Setup and Laser Line Detection
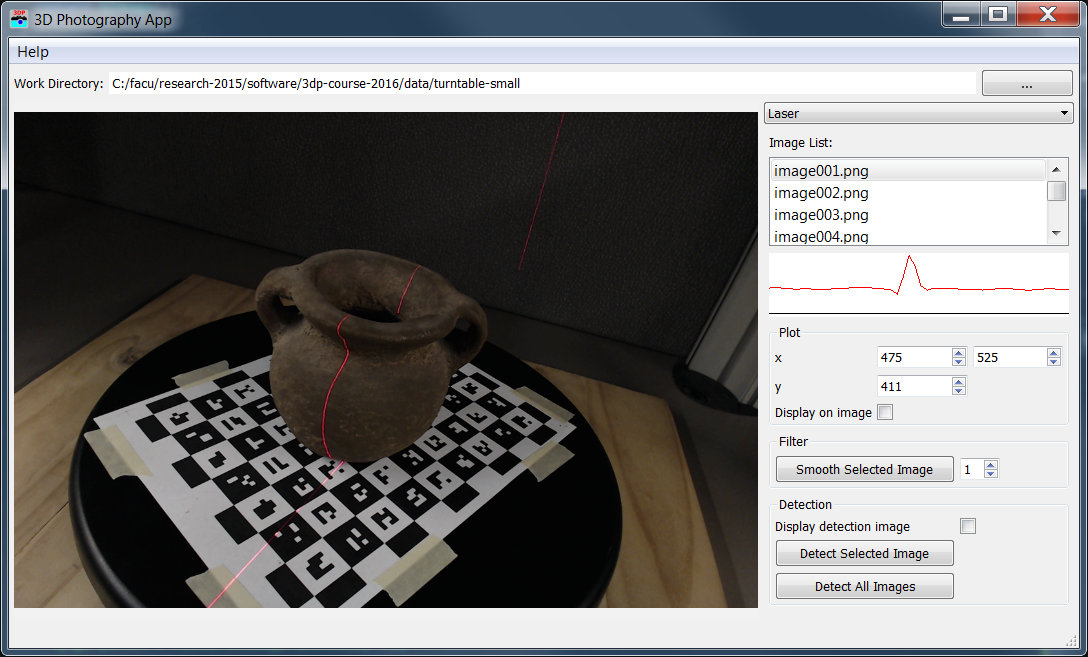
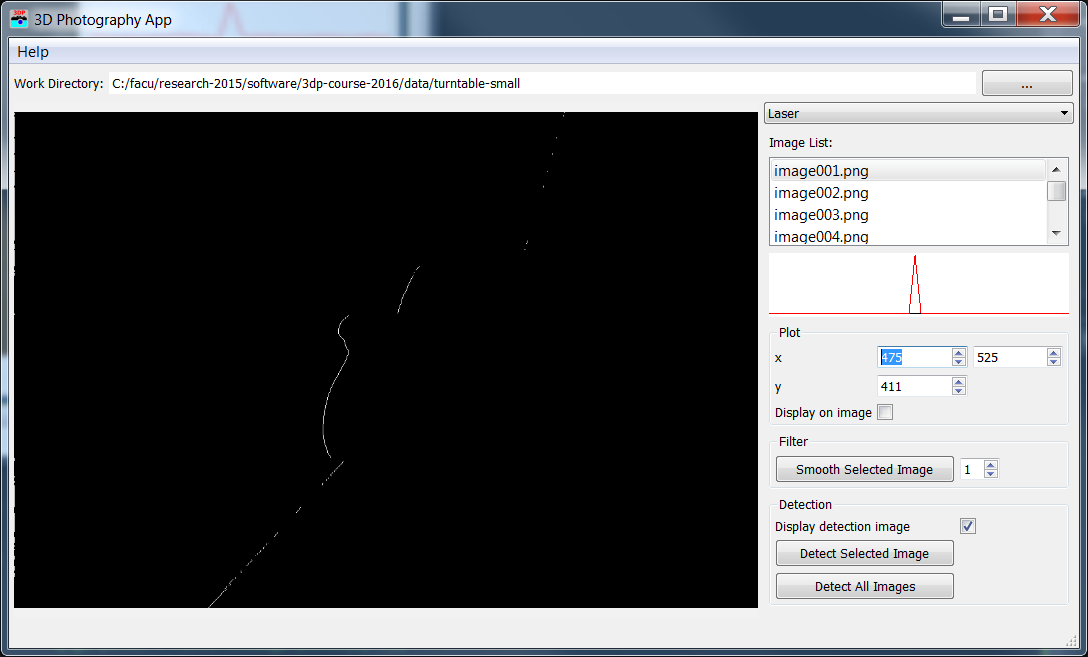
The goal of this assignment is to setup the 3D Photography software which we will use in all the course assignments. In addition, we will implement a simple image filter operation and an image processing function to detect a laser line in images. This is the first step towards the implementation of our own laser slit 3D scanner that we will build during the course.
[released 02/01/2018] read more...
Assignment 2
Matlab Camera Calibration and Optical Triangulation
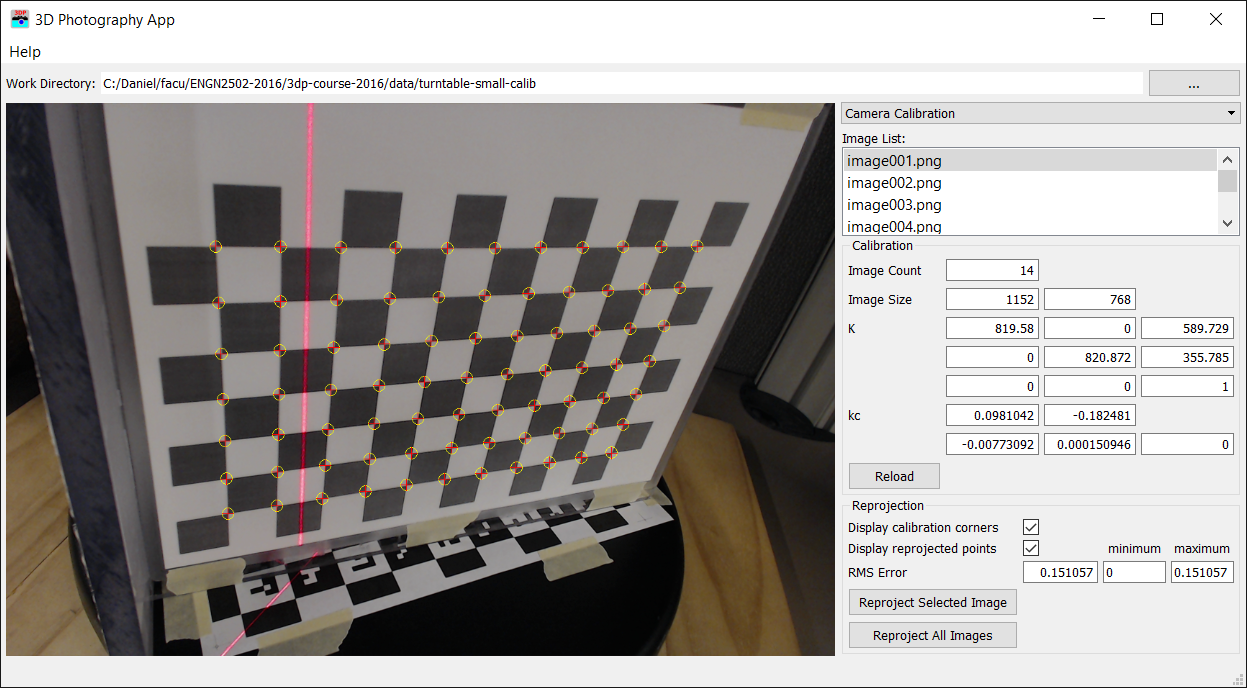
In this assignment we will calibrate our camera, validate the calibration by reprojecting a set of corners on the image plane, and implement Ray-Plane triangulation to create a 3D pointcloud.
[released 02/08/2018] read more...
Assignment 3
Turntable and Laser Plane Calibration

In a turntable-based 3D scanner, such as the one we are building, the world coordinate system is usually defined so that the origin is located at the intersection of the axis of rotation and the turntable plane, the z axis is aligned with the axis of rotation, the x and y axes span the turntable plane. In this assignment we will calibrate the turntable coordinate system by estimating the turntable plane and axis of rotation. We will also estimate the equation of the laser plane with respect to the camera coordinate system, which given the construction of our laser-based 3D scanner, does not change over time.
[released 02/22/2018] read more...
Assignment 4
Build-Your-Own Desktop Laser 3D Scanner
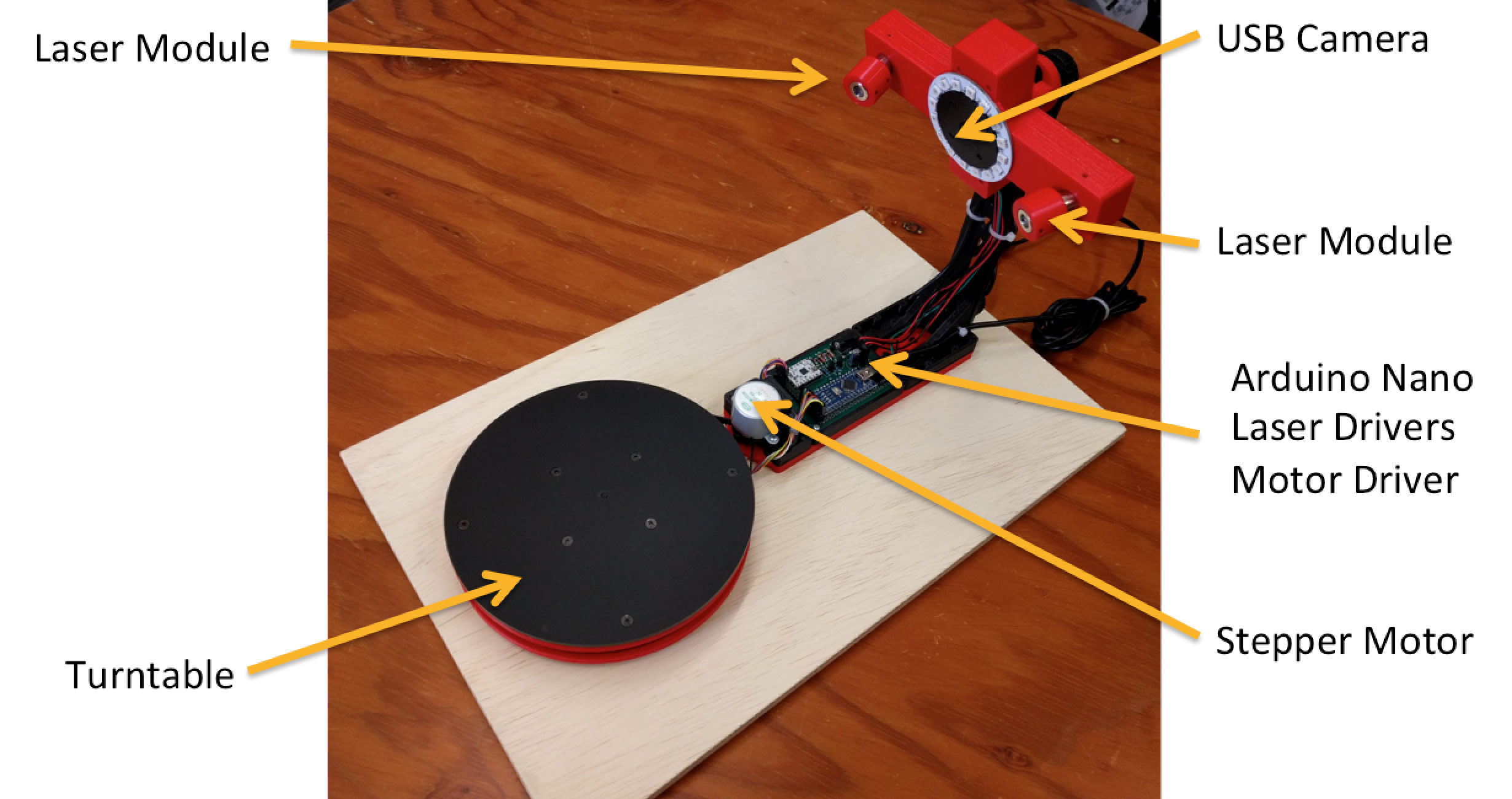
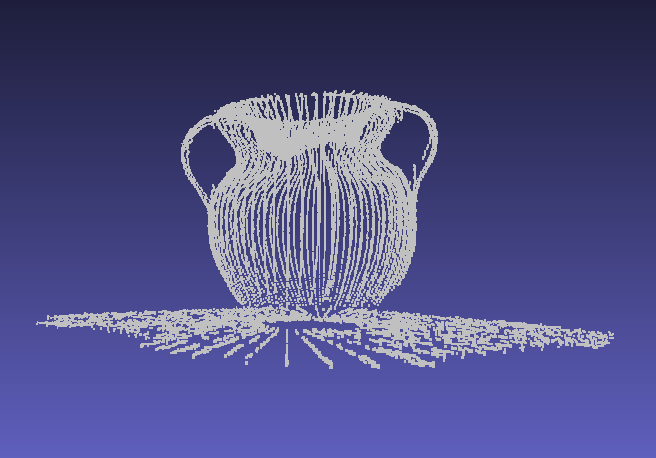
In this assignment we combine the work done in previous assignments to make a working laser 3D scanner.
[released 04/06/2018] read more...
Assignment 5
Structured Lighting
Assignment 6
Multi-View Registration and Merging