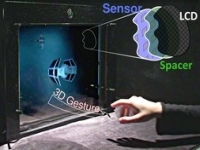
BiDi Screen:
A Thin, Depth-Sensing LCD
We transform an LCD into a BiDirectional (BiDi) screen allowing 2D multi-touch and 3D gestures. An image sensor is placed behind the liquid crystal layer, forming a mask-based light field camera and allowing passive depth estimation. Applications include hybrid 2D/3D gestures and image-based relighting.
BiDi Screen: A Thin, Depth-Sensing LCD for 3D Interaction using Light Fields (pdf)
Matthew Hirsch, Douglas Lanman, Henry Holtzman, and Ramesh Raskar
ACM Transactions on Graphics (Proceedings of SIGGRAPH Asia 2009)
Additional Material: project website, supplementary appendix

Shield Fields:
Modeling and Capturing 3D Occluders
In this paper we decouple 3D occluders from 4D illumination using shield fields: the 4D attenuation function which acts on any light field incident on an occluder. We then analyze occluder reconstruction from cast shadows, leading to a single-shot light field camera for visual hull reconstruction.
Shield Fields: Modeling and Capturing 3D Occluders (pdf)
Douglas Lanman, Ramesh Raskar, Amit Agrawal, and Gabriel Taubin
ACM Transactions on Graphics (Proceedings of SIGGRAPH Asia 2008)
Additional Material: project website

Image Destabilization:
Defocus using Lens and Sensor Motion
We propose an imaging system in which the lens and sensor are perturbed during the exposure. We analyze the defocus effects, demonstrating approximately depth-independent defocus and exaggerated, programmable, and pleasing bokeh with small apertures (such as those found in mobile phones).
Image Destabilization: Programmable Defocus using Lens and Sensor Motion (pdf)
Ankit Mohan, Douglas Lanman, Shinsaku Hiura, and Ramesh Raskar
IEEE International Conference on Computational Photography (ICCP 2009)
Additional Material: project website, presentation (ppt), supplementary material (zip)

Modeling and Synthesis of
Aperture Effects in Cameras
In this paper we describe the capture, analysis, and synthesis of vignetting and depth-of-field effects in conventional cameras. We also consider calibration using point sources and introduce the Bokeh Brush: a novel, post-capture method for full-resolution control of the shape of out-of-focus points.
Modeling and Synthesis of Aperture Effects in Cameras (ps, pdf)
Douglas Lanman, Ramesh Raskar, and Gabriel Taubin
Int'l Symposium on Computational Aesthetics in Graphics, Visualization, and Imaging (CAe 2008)
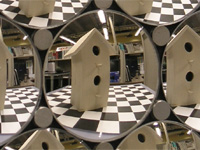
Surround Structured Lighting
This paper presents a new system for rapidly acquiring complete 3D models using a single structured light projector, a pair of planar mirrors, and one or more cameras. Using an orthographic projector composed of a Fresnel lens and a DLP projector, we display a single Gray code sequence to encode all the illumination planes within the scanning volume.
Surround Structured Lighting for Full Object Scanning (ps, pdf)
Douglas Lanman, Daniel Crispell, and Gabriel Taubin
6th International Conference on 3D Digital Imaging and Modeling (3DIM 2007)
Additional Material: presentation (pdf, ppt)
Surround Structured Lighting: 3-D Scanning with Orthographic Illumination
Douglas Lanman, Daniel Crispell, and Gabriel Taubin
Elsevier Journal for Computer Vision and Image Understanding (CVIU)
Special Issue on New Advances in 3D Imaging and Modeling, Spring 2009
Shape from Depth Discontinuities
under Orthographic Projection
We recover the 3-D surface of opaque objects, viewed under orthographic projection while rotated on a turntable. Gaps are filled using a novel shape completion scheme. For verification, we construct a large-format orthographic multi-flash camera and analyze limitations for point and directional illumination.
Shape from Depth Discontinuities under Orthographic Projection (ps, pdf)
Douglas Lanman, Daniel Cabrini Hauagge, and Gabriel Taubin
IEEE International Workshop on 3-D Digital Imaging and Modeling (3DIM 2009)
Additional Material: poster, supplementary material

Multi-Flash 3D Photography
We describe a new 3D scanning system which exploits the depth discontinuity information captured by the multi-flash camera proposed by Raskar et al. in 2004. In contrast to existing differential and global shape-from-silhouette algorithms, our method can reconstruct the position and orientation of points located deep inside concavities.
Beyond Silhouettes: Surface Reconstruction using Multi-Flash Photography (ps, pdf)
Daniel Crispell, Douglas Lanman, Peter G. Sibley, Yong Zhao, and Gabriel Taubin
Third International Symposium on 3D Data Processing, Visualization and Transmission (3DPVT 2006)
Multi-Flash 3D Photography: Capturing Shape and Appearance (ps, pdf)
Douglas Lanman, Peter G. Sibley, Daniel Crispell, Yong Zhao, and Gabriel Taubin
33rd International Conference on Computer Graphics and Interactive Techniques (SIGGRAPH 2006)
Additional Material: poster, supplementary material
Shape from Depth Discontinuities
Daniel Crispell, Douglas Lanman, Peter G. Sibley, Yong Zhao, and Gabriel Taubin
Emerging Trends in Visual Computing, Lecture Notes in Computer Science Series (LNCS)
Springer-Verlag, Vol. 5416, 2009
Catadioptric Systems
Catadioptric imaging systems are composed of both lenses and mirrors. In my research at Brown, I am working with Prof. Gabriel Taubin to develop novel computer vision algorithms using these systems. Current efforts focus on system design, calibration techniques, and 3D reconstruction. To date, two papers have been accepted for publication in this area.
Reconstructing a 3D Line from a Single Catadioptric Image (ps, pdf)
Douglas Lanman, Megan Wachs, Gabriel Taubin, and Fernando Cukierman
Third International Symposium on 3D Data Processing, Visualization and Transmission (3DPVT 2006)
Additional Material: poster
Spherical Catadioptric Arrays: Construction, Multi-View Geometry, and Calibration (ps, pdf)
Douglas Lanman, Daniel Crispell, Megan Wachs, and Gabriel Taubin
Third International Symposium on 3D Data Processing, Visualization and Transmission (3DPVT 2006)
Additional Material: poster

Visual Sensor Networks
Sensor networks have received a great deal of attention lately. In a similar vein, we seek to develop methods for utilizing distributed ad-hoc networks of "smart" camera-processor nodes. Current research is focused on developing robust autocalibration procedures. A more detailed description is available in this paper summary.

Model-based Face Capture
A novel method was developed for creating photo-realistic 3D face models from 2D images of a subject. A scattered data interpolation algorithm was used to deform an exemplar mesh to fit individual face geometries.
Results: report, presentation, website
Sensor Network Simulation
As an intern at Los Alamos National Laboratory I created a comprehensive sensor network simulation package. Working with Dr. Anders M. Jorgensen, I also developed a novel algorithm for distributed audio source localization.
Results: presentation

Distributed Task Allocation
For a final course project in EE 141: Swarm Intelligence, I contributed to the development of novel division-of-labor algorithms for multi-robot systems. Studies were conducted using the Webots simulator and Khepera robots.
Results: report, website, animation, publication
Last Updated: November 30, 2009